Kooplearn Datasets Visualization¶
This notebook visualizes the various datasets available in the kooplearn library.
[2]:
import matplotlib.pyplot as plt
import numpy as np
from kooplearn.datasets import (
fetch_ordered_mnist,
make_duffing,
make_linear_system,
make_logistic_map,
make_lorenz63,
make_prinz_potential,
make_regime_switching_var,
)
# Set professional style
plt.style.use('seaborn-v0_8-whitegrid')
plt.rcParams['figure.facecolor'] = 'white'
plt.rcParams['axes.facecolor'] = '#f8f9fa'
plt.rcParams['font.size'] = 11
plt.rcParams['axes.labelsize'] = 12
plt.rcParams['axes.titlesize'] = 13
plt.rcParams['xtick.labelsize'] = 10
plt.rcParams['ytick.labelsize'] = 10
kl_color = '#2A7E69'
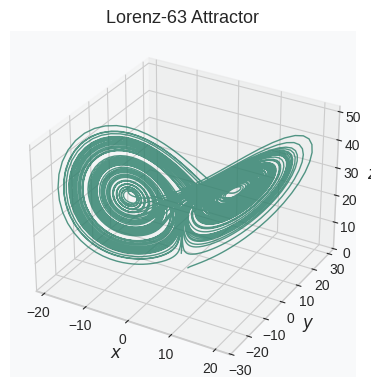
Lorenz-63 System¶
The Lorenz-63 system is a simplified mathematical model of atmospheric convection that exhibits chaotic behavior. It is one of the most famous examples of deterministic chaos. The system is governed by:
[3]:
data = make_lorenz63(X0=[1, 1, 1], n_steps=1e4)
fig = plt.figure(figsize=(4, 4))
ax = fig.add_subplot(111, projection='3d')
ax.plot(data["x"], data["y"], data["z"], color=kl_color, lw=1, alpha=0.8)
ax.set_title("Lorenz-63 Attractor")
ax.set_xlabel("$x$", labelpad=-5)
ax.set_ylabel("$y$", labelpad=-5)
ax.set_zlabel("$z$", labelpad=-5)
ax.tick_params(axis='both', which='major', pad=-2)
ax.grid(True)
plt.tight_layout()
plt.show()
fig.savefig("lorenz63_attractor.svg", format='svg', dpi=300) # Save as SVG file
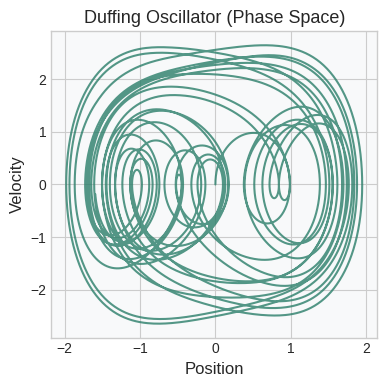
Duffing Oscillator¶
The Duffing oscillator is a damped driven nonlinear harmonic oscillator commonly used to study chaotic dynamics in physics and engineering. The system is governed by the differential equation:
[4]:
data = make_duffing(X0=[0, 0], n_steps=1e4, dt=0.01, alpha=-1.0, beta=1.0, delta=0.3, gamma=2)
fig, ax = plt.subplots(1, 1, figsize=(4, 4))
# Phase space plot
ax.plot(data["position"], data["velocity"], c=kl_color, alpha=0.8)
ax.set_title("Duffing Oscillator (Phase Space)")
ax.set_xlabel("Position")
ax.set_ylabel("Velocity")
ax.grid(True)
plt.tight_layout()
plt.show()
fig.savefig("duffing_phase_space.svg", format='svg', dpi=300) # Save as SVG file
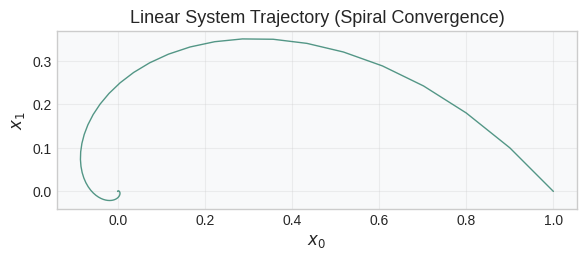
Linear System¶
The linear dynamical system is governed by:
where \(\xi_t \sim \mathcal{N}(0, \sigma^2 I)\) is zero-mean Gaussian noise with standard deviation \(\sigma\). For this linear system, the Koopman operator is simply the transpose \(A\).
[5]:
# Linear system with spiral convergence
A = np.array([[0.9, -0.1], [0.1, 0.9]])
X0 = np.array([1, 0.0])
data = make_linear_system(X0, A, n_steps=int(1e2), noise=0.0)
fig, ax = plt.subplots(figsize=(6, 6))
ax.plot(data["x0"], data["x1"], color=kl_color, lw=1, alpha=0.8)
ax.set_title("Linear System Trajectory (Spiral Convergence)")
ax.set_xlabel("$x_0$")
ax.set_ylabel("$x_1$")
ax.grid(True, linestyle='-', alpha=0.3)
ax.set_aspect('equal')
plt.tight_layout()
plt.show()
fig.savefig("linear_system_spiral.svg", format='svg', dpi=300) # Save as SVG file
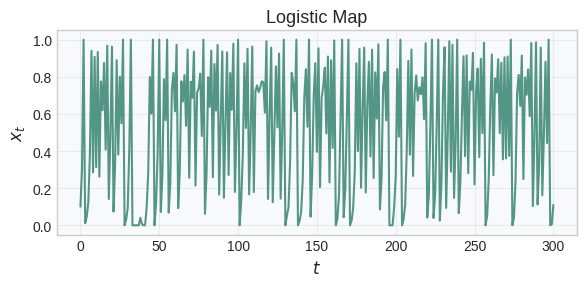
Logistic Map¶
The logistic map is a discrete-time dynamical system defined by:
where \(\xi_t\) is drawn from a trigonometric noise distribution. The classic chaotic logistic map uses \(r = 4\). For this system with trigonometric noise, the eigenfunctions of the Koopman operator can be computed analytically using the basis:
for \(i = 0, 1, \ldots, 2M\).
[6]:
data = make_logistic_map(X0=0.1, n_steps=300)
fig, ax = plt.subplots(1, 1, figsize=(6, 3))
# Time series
ax.plot(np.arange(len(data)), data["x"], color=kl_color, lw=1.5, alpha=0.8)
ax.set_title("Logistic Map")
ax.set_xlabel("$t$")
ax.set_ylabel("$x_t$")
ax.grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
fig.savefig("logistic_map.svg", format='svg', dpi=300) # Save as SVG file
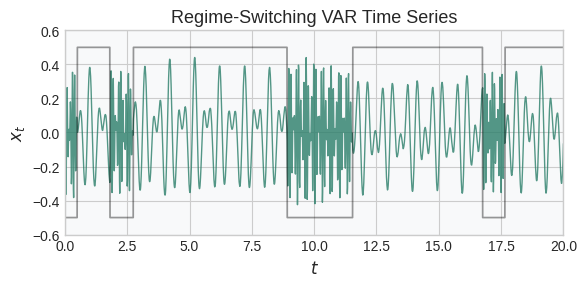
Regime Switching VAR¶
This model alternates between two linear dynamical regimes according to a Markov transition matrix. At each step, the system evolves according to one of two dynamics matrices phi1 or phi2, with optional Gaussian noise. Mathematically, the system evolves as:
where \(s_t\) is the active regime (0 or 1), evolving according to a 2x2 Markov transition matrix \(P\) such that
[7]:
import scipy
def make_oscillatory_matrix(frequencies, dt=1.0):
blocks = []
for f in frequencies:
if f < 0:
raise ValueError("Frequencies must be non-negative.")
omega = 2 * np.pi * f
theta = omega * dt
rotation_matrix = np.array(
[[np.cos(theta), -np.sin(theta)], [np.sin(theta), np.cos(theta)]]
)
blocks.append(rotation_matrix)
return scipy.linalg.block_diag(*blocks)
[8]:
dt = 0.01
n_steps = 2000
noise = 0.001
fast_frequencies = [10, 13]
fast_phi = make_oscillatory_matrix(fast_frequencies, dt=dt)
slow_frequencies = [2, 3]
slow_phi = make_oscillatory_matrix(slow_frequencies, dt=dt)
regime_transition_matrix = np.array([[0.99, 0.01], [0.005, 0.995]])
# Initial state
X0 = 0.1 * np.ones(slow_phi.shape[0])
X = make_regime_switching_var(
X0,
fast_phi,
slow_phi,
regime_transition_matrix,
n_steps=n_steps,
noise=noise,
dt=dt,
random_state=0
)
y = X.values.sum(axis=1) # Sum the states into a single signal
times = X.index.get_level_values("time")
regimes = X.attrs['regimes']
fig, ax = plt.subplots(1, 1, figsize=(6, 3))
ax.plot(times, y, color=kl_color, lw=1, alpha=0.8)
ax.plot(times, regimes - 0.5, color='k', lw=1.25, alpha=0.4)
ax.legend(frameon=False, ncols=2)
ax.set_title("Regime-Switching VAR Time Series")
ax.set_ylabel("$x_t$")
ax.set_xlabel("$t$")
ax.set_ylim(-0.6, 0.6)
ax.margins(0)
plt.tight_layout()
plt.show()
fig.savefig("regime_switching_var.svg", format='svg', dpi=300) # Save as SVG file
/tmp/ipykernel_41876/1859277158.py:31: UserWarning: No artists with labels found to put in legend. Note that artists whose label start with an underscore are ignored when legend() is called with no argument.
ax.legend(frameon=False, ncols=2)
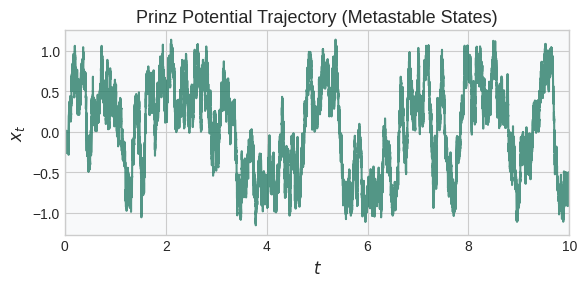
Prinz Potential¶
This quadruple-well potential exhibits three metastable states separated by energy barriers. The dynamics follow the (discretized) overdamped Langevin equation:
where \(\xi_t\) is a Gaussian white noise process with zero mean and unit variance, \(\gamma\) is the friction coefficient, and \(k_B T = \frac{\sigma^2}{2\gamma}\) determines the thermal energy scale.
The potential is defined as:
[ ]:
data = make_prinz_potential(X0=0.0, n_steps=100000, gamma=1, sigma=2)
fig, ax = plt.subplots(figsize=(6, 3))
ax.plot(data.index.get_level_values('time'), data["x"], color=kl_color, alpha=0.8)
ax.set_title("Prinz Potential Trajectory (Metastable States)")
ax.set_xlabel("$t$")
ax.set_ylabel("$x_t$")
ax.set_xlim(0, 10)
plt.tight_layout()
plt.show()
fig.savefig("prinz_potential.svg", format='svg', dpi=300) # Save as SVG file
Plotting Prinz Potential...
Ordered MNIST¶
This function wraps `sklearn.datasets.fetch_openml <https://scikit-learn.org/stable/modules/generated/sklearn.datasets.fetch_openml.html>`__ for the MNIST dataset (OpenML ID 554) and reorders the samples so that digits 0 through num_digits - 1 are interleaved in the output. This is useful for generating class-balanced or periodic sequences for Koopman operator regression experiments.
The MNIST dataset contains 70,000 grayscale handwritten digits (60,000 for training and 10,000 for testing) of size 28×28.
[ ]:
import matplotlib.colors as mcolors
# 1. Define the colors
hex_color = "#2A7E69"
white = "#FFFFFF"
# 2. Create the colormap
custom_cmap = mcolors.LinearSegmentedColormap.from_list("teal_to_white", [hex_color, white])
images, targets = fetch_ordered_mnist(num_digits=5)
n_img = 10
fig, axes = plt.subplots(1, 10, figsize=(6, 1.2))
for i, ax in enumerate(axes.flat):
if i < n_img:
ax.imshow(images[i], cmap=custom_cmap)
ax.set_title(f"{targets[i]}")
ax.axis('off')
plt.suptitle("Ordered MNIST (Interleaved Classes)")
plt.tight_layout()
plt.show()
fig.savefig("ordered_mnist_interleaved.svg", format='svg', dpi=300) # Save as SVG file

[ ]: